Båtkontroll vid fiske kan innefatta ett antal moment. I den här artikeln ska jag gå igenom grundläggande principer för fiske med ankare, driftfiske på tomgång samt gps-styrd frontmonterad elmotor. Jag kommer även i korta drag redogöra för när jag föredrar de olika teknikerna.
Ankring
Ankring med ett traditionellt ankare är en metod som nästan glömts bort lite senaste åren med alla de nya tekniker som finns idag. Sedan elmotorn kom är min uppfattning att vi ankrar mindre och mindre. Det finns tre typer av ankare som är värda att känna till.
 |
 |
 |
Tallriksankaret
För hård och mjuk botten
|
Draggen
För hård botten
|
Bruce-ankaret
Bäst på mjuka bottnar
|
Det är vanliga "plätten" eller tallriksankaret som det också heter. Dessa lämpar sig bäst på mjuk botten som exempelvis dy. Plätten skulle jag också hålla som det ankare som kanske är mest allround av de tre. För hård botten lämpar sig draggen allra bäst som med sina utstickande armar lätt greppar om stenar, skrevor och liknande. Det är också det ankare som är lättast att bli av med då det kan kila fast sig under exempelvis stenblock. Det tredje och det absolut bästa alternativet för mjuk botten är det så kallade bruce-ankaret som korrekt använt gräver ned sig i botten.
I min båt har jag alltid ett 8 kg tallriksankare samt ett 7,5 kg Bruce-ankare. Tallriksankaret använder jag när det är stenigt och i övrigt använder jag bruce-ankaret. Dessa två kompletterar varandra mycket väl. Jag rekommenderar att man alltid har 1,5 m kätting innan ankaret. Detta är särskilt viktigt för Bruce-ankaret då det lättare gräver ner sig och man kan då även korta ner linsläppet något.
När ankarar jag då? Det skiljer sig så klart beroende på art, årstid m.m. Men kort sammanfattat så ankrar jag i stort sett alltid när jag spinnfiskar abborre och gös. När jag fiskar gädda ankrar jag mycket vår och höst. Det mest effektiva är i regel att tjata upp fisk på samma ankring. Har man en vik, grynna eller kant som man vet håller fisk så är det ankring som gäller. Fisken rör sig ogärna i onödan och det kan vara helt avgörande att komma riktigt nära. Då krävs det många kast på en liten fläck. Denna metod tycker jag är bäst när jag är ute efter stor gädda då de är än mer inaktiva jämfört med de mindre fiskarna. 99% av mitt spinnfiske efter havsöring gör jag med elmotor eller på drift.
Driftfiske
 Driftfiske är en mycket effektiv metod då jag vill täcka av ett större område. Exempelvis vid havsöringsfiske så kan det ofta vara helt avgörande att hinna fiska av så mycket ställen som möjligt på en dag för att lokalisera fisken. Något som jag tycker man bör försöka lära sig är att drifta av en kant med motorn avslagen. Man blir förvånad över hur mycket man kan förändra på driften bara genom att ha ett visst rattutslag. Alltså genom att ändra motorns läge kan man styra en drift rätt så effektivt. Farten är en annan parameter att ta hänsyn till. Farten beror givetvis på vilken art man fiskar efter samt hur många man är i båten men en fart på mellan 0,4 och 1,5 knop. Farten kan regleras med ett drivankare men det går då endast att sänka farten. Dock så tappar man i stort sett all styrförmåga med roderläget när du använder ett drivankare. Då kan du istället påverka driftens kurs med hur du fäster drivankaret i båten. Vilket jag försöker illustrera i bilden bredvid. Alla båtar svarar olika vid användning av olika storlekar på drivankare. Det gäller att lära känna sin egen båt och då är det timmar på vattnet som behövs. Se detta som en enkel guide för att komma igång något snabbare. Fiske med eller utan drivankare fungerar bäst då vinden ligger på längs med eller med sned pålandsvind. Jag upplever det som mycket svårare att få en bra drift med sned frånlandsvind och i stort sett omöjligt att få en bra drift vid rak frånlandsvind. Då är alternativet att köra på tomgång med motorn och hela tiden korrigera driften med motorn.
Driftfiske är en mycket effektiv metod då jag vill täcka av ett större område. Exempelvis vid havsöringsfiske så kan det ofta vara helt avgörande att hinna fiska av så mycket ställen som möjligt på en dag för att lokalisera fisken. Något som jag tycker man bör försöka lära sig är att drifta av en kant med motorn avslagen. Man blir förvånad över hur mycket man kan förändra på driften bara genom att ha ett visst rattutslag. Alltså genom att ändra motorns läge kan man styra en drift rätt så effektivt. Farten är en annan parameter att ta hänsyn till. Farten beror givetvis på vilken art man fiskar efter samt hur många man är i båten men en fart på mellan 0,4 och 1,5 knop. Farten kan regleras med ett drivankare men det går då endast att sänka farten. Dock så tappar man i stort sett all styrförmåga med roderläget när du använder ett drivankare. Då kan du istället påverka driftens kurs med hur du fäster drivankaret i båten. Vilket jag försöker illustrera i bilden bredvid. Alla båtar svarar olika vid användning av olika storlekar på drivankare. Det gäller att lära känna sin egen båt och då är det timmar på vattnet som behövs. Se detta som en enkel guide för att komma igång något snabbare. Fiske med eller utan drivankare fungerar bäst då vinden ligger på längs med eller med sned pålandsvind. Jag upplever det som mycket svårare att få en bra drift med sned frånlandsvind och i stort sett omöjligt att få en bra drift vid rak frånlandsvind. Då är alternativet att köra på tomgång med motorn och hela tiden korrigera driften med motorn.
Frontmonterad gps-styrd elmotor
Det här är något som har kommit väldigt starkt på senare år. Även om priserna sjunkigt något så är detta en ganska dyr investering - åtminstone om man vill ha en elmotor som har gps-styrning. Dock kan jag med handen på hjärtat säga att det är det bästa köp jag gjort i fiskeutrustningsväg. Det öppnar upp en helt ny värld av möjligheter. Alltifrån helt perfekta kilometerlånga drifter i perfekt fart till att utforska riktigt grunda och steniga vatten som tidigare var oåtkomliga.
Jag personligen har en Minn Kota Riptide TR 80 lbs 24v med I-pilot. Dragstyrkan (det benämns som dragstyrka då motorn sitter i fören och drar fram båten) är alltså på 80 lbs vilket motsvarar ca 36 kg. Min båt väger ca 1400 kg med motor, fyra personer, bensin och fiskeutrustning. Dessutom har den ett ganska stort vindfång. Det finns tabeller på nätet med vilken styrkan man ska ha för sin båt. Men tro mig när jag säger det. Är det lite på gränsen i ditt fall så välj alltid det starkare alternativet. Har du en så pass stor båt att valet står mellan en 70 lbs 12v och en 80lbs 24v så välj alltid 24 voltaren. 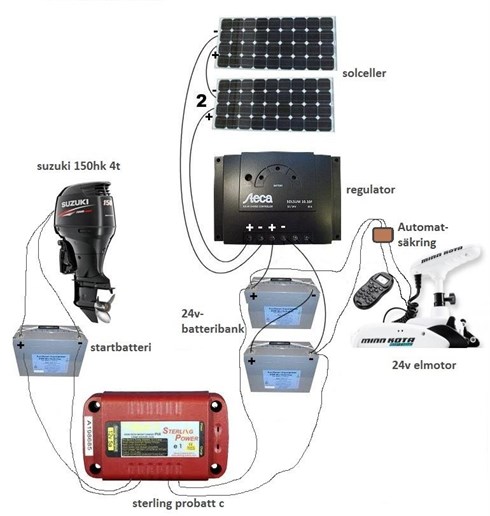 Det är en helt annan styrka i en sådan motor i och med att den går på 24v men framförallt så drar den betydligt mycket mindre el. Att välja en för svag motor resulterar endast i att den inte går att använda fullt ut när det blåser lite och då är det pengar i sjön enligt mitt tycke. En annan mycket viktig faktor som man inte heller ska snåla på är batterierna samt kablage. Välj kvalitetsbatterier och en batterityp som tål djupa urladdningar. Lithiumbatterier är nog absolut bäst men dessa är fortfarande helt orimligt dyra så idag är det bästa alternativet AGM-batterier. Jag själv kör med två Global 95 AH 12v batterier som är seriekopplade till 24v. Visst de kostar en slant men det har man igen i längden. 95 AH kan tyckas som lite men det räcker utan problem en hel dag. Dessutom har jag ett system som gör att dessa laddas när jag kör med huvudmotorn.
Det är en helt annan styrka i en sådan motor i och med att den går på 24v men framförallt så drar den betydligt mycket mindre el. Att välja en för svag motor resulterar endast i att den inte går att använda fullt ut när det blåser lite och då är det pengar i sjön enligt mitt tycke. En annan mycket viktig faktor som man inte heller ska snåla på är batterierna samt kablage. Välj kvalitetsbatterier och en batterityp som tål djupa urladdningar. Lithiumbatterier är nog absolut bäst men dessa är fortfarande helt orimligt dyra så idag är det bästa alternativet AGM-batterier. Jag själv kör med två Global 95 AH 12v batterier som är seriekopplade till 24v. Visst de kostar en slant men det har man igen i längden. 95 AH kan tyckas som lite men det räcker utan problem en hel dag. Dessutom har jag ett system som gör att dessa laddas när jag kör med huvudmotorn.
Kopplingsschemat ser du här ovan. Mer om min lösning kommer jag skriva om vid ett annat tillfälle. Ok. Nog om utrustningen. Så hur använder jag min elmotor?
Till att börja med så har I-pilot en rad funktioner. Det är i stort sett endast fyra av dessa jag använder regelbundet. De funktioner jag använder är Spot-lock, Autopilot, Co-pilot och cruise control. Jag kommer nu gå in på de olika funktionerna, vad dem innebär, när jag använder dem osv.
 Spot lock
Spot lock
Är en elektronisk ankring där elmotorn försöker hålla båten så stilla som möjligt med hjälp av GPS-teknik. I ärligthetens namn är denna funktion lite för oexakt för att kunna ersätta det klassiska ankaret. Jag tycker man fladdrar omkring lite för mycket och särskilt när det är mycket vindbyar. Det tar en liten stund för motorn att förstå hur mycket kraft den måste sätta emot en vindpust och när den väl förstått detta så överkompenserar den ofta så att man glider förbi ankringspunkten.
Dock tycker jag det är en helt suverän funktion för ankring på lite djupare vatten då jag inte riskerar att skrämma fisk lika lätt samt vid lugnare väder. Men det jag använder funktionen mest till är när man tex vid en drift längs med en kant av någon anledning måste stanna upp en stund. Det kan vara trassel på rullen, kroka av en fisk som svalt osv. Något som gör att man måste släppa fokus på driften för att fokusera på något annat. Då vet jag att motorn åtminstonde hindrar mig från att blåsa upp på land och jag kan återuppta driften så fort problemet är löst.
Autopilot
Är också en funktion där motorn använder sig av GPS-teknik för att hålla en viss kurs. Med denna funktion så sätter man en så kallad kög (kurs över grund). Väldigt för enklat så är det din position i förhållande till jorden. Den kommer därför att kompensera för vind, strömmar och avdrift eftersom en vind tex puttar dig från denna kurs över grund. Jag använder inte denna funktion jätteofta men den är i vissa lägen väldigt användbar. Autopilotens begränsning tycker jag är att den kräver hela tiden en viss fart på propellern för att orka hålla en kurs. Kommer det en sidovind och jag har för låg fart på propellern så orkar den helt enkelt inte kompensera för detta vilket är logiskt. Alternativet är att använda funktionen i kombination med cruise control som jag kommer in på närmare här nedan. Det funkar godtyckligt men så fort det är lite vindbyar så börjar den sacka efter igen. Det som då hjälper är att ha en högre fart inställd på cruise control men då tycker jag driften går för snabbt förutom möjligtvis vid havsöringsfiske. Jag använder med andra ord Autopilot oftast när det är lite lugnare väder då jag kan köra rakt eller snett mot vinden utan att behöva dra på allt för mycket på kraften. I medvind funkar autopiloten dåligt.
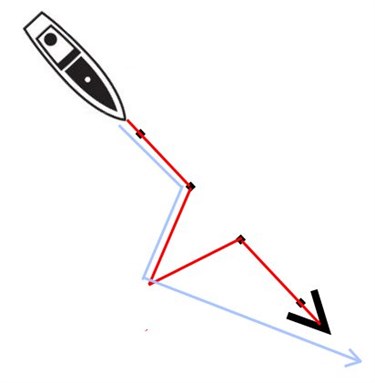 Autopiloten har ytterligar en svaghet som jag ska försöka beskriva här. När jag satt en kurs så ritar motorn upp punkter på en linje i den riktningen jag tänkt åka. Problemet som då kan uppstå är att om jag befinner mig mellan två av dessa punkter och det kommer en kastvind som får mig att driva av spåret lite i sidled så försöker motorn ta mig till nästa punkt direkt istället för att lite snyggt smyga sig in på spåret på nytt. Vilket jag försöker illustrera i bilden till höger. De svarta punkterna är den kurs jag sagt till motorn att jag vill följa och den röda linjen är hur motorn kan bete sig vid en plötslig kastvind. Den blå linjen är hur jag hade önskat att motorn skulle bete sig om den kraftigt kom ur kurs.
Autopiloten har ytterligar en svaghet som jag ska försöka beskriva här. När jag satt en kurs så ritar motorn upp punkter på en linje i den riktningen jag tänkt åka. Problemet som då kan uppstå är att om jag befinner mig mellan två av dessa punkter och det kommer en kastvind som får mig att driva av spåret lite i sidled så försöker motorn ta mig till nästa punkt direkt istället för att lite snyggt smyga sig in på spåret på nytt. Vilket jag försöker illustrera i bilden till höger. De svarta punkterna är den kurs jag sagt till motorn att jag vill följa och den röda linjen är hur motorn kan bete sig vid en plötslig kastvind. Den blå linjen är hur jag hade önskat att motorn skulle bete sig om den kraftigt kom ur kurs.
Cruise Control
Är bilens motsvarighet till farthållare. Man ställer in en hastighet i miles per hour (mph) och för att göra det lätt att räkna så kan vi avrunda lite och då är 1 mph = 1 knop. Även denna funktion använder sig av GPS-teknologin och därför kompenserar motorn för plötslig motvind. Denna funktion fungerar absolut bäst när man kör snett eller helt emot vinden. Åker man i vindens färdriktning och det blåser lite så är det lätt hänt att man kör lika snabbt eller snabbare som man ställt in farten på och då kommer propellern sluta snurra vilket medför att man kommer ur kurs om funktionen används i kombination med autopilot eller co-pilot.
Co-pilot
Är den funktion jag använder absolut mest. Istället för att använda GPS för positionering så använder motorn sig av en kompasskurs. Enkelt förklarat så fungerar det som så att om du ställer propellern i en viss riktning så kommer motorn att alltid peka i den riktningen oavsett hur båten snurrar. Detta är väldigt användbart då jag vill drifta av en vasskant där vinden ligger på antingen rakt emot land eller snett emot. Med- eller motvind spelar inte heller någon större roll. Jag använder funktionen för att bromsa mot vinden när det går för snabbt. Det krävs lite träning men efter ett tag så kan man göra hur långa drifter som helst med perfekt resultat.